Глоссарий и часто задаваемые вопросы
Глоссарий
| Датчики температуры | Примеры датчиков | Тип чувствительного элемента | Прибор | ||||||||||||
| 2ТРМ0 ТРМ1 2ТРМ1 ТРМ10 ТРМ12 | ТРМ200 ТРМ201 ТРМ202 ТРМ210 ТРМ212 ТРМ101 ТРМ148 ТРМ133 ТРМ151 ТРМ251 | УКТ38-Щ4 | УКТ38-В | ТРМ500 | ТРМ501 | ТРМ502 | ТРМ138 ТРМ136 | ТРМ138В | ТРМ32.Щ4 ТРМ33.Щ4 | ТРМ32.Щ7 ТРМ33.Щ7 | ТРМ132М ТРМ133М ТРМ232М | МПР51 | |||
| Обозначение программируемого параметра | |||||||||||||||
| b1-0 | in.t | P-01 | Р-01 | S.tYP | TIN |
| in.t | in-t | Р-01 | Р−01 |
| o01 | |||
| Код типа датчика | |||||||||||||||
| ДТСХХ4 ДТСХХ5 | ОВЕН ДТС054-50М.В3.60/1 ОВЕН ДТС045-50М.В3.120 | 50М (a=0.00428°C-1) | 09 | r428 | 09 | 04 | c.50 | 09 | нет | tY09 | tY09 | хх.04 | 0003 | ТС50М1.428 | 003 |
| ДТСХХ4 ДТСХХ5 | ОВЕН ДТС054-100М.В3.60/1 ОВЕН ДТС045-100М.В3.120 | 100М (a=0.00428°C-1) | 14 | r.428 | 14 | 04 | c.100 | 14 | нет | tY14 | tY14 | хх.04 | 0007 | ТС100М1.428 | 003 |
| ДТСХХ4 ДТСХХ5 | ОВЕН ДТС054-50П.В3.60/1 ОВЕН ДТС045-50П.В3.120 | 50П (a=0.00391°C-1) | 08 | r391 | 08 | 03 | 50П | 08 | нет | tY08 | tY08 | хх.03 | 0002 | ТС50П1.391 | 002 |
| ДТСХХ4 ДТСХХ5 | ОВЕН ДТС054-100П.В3.60/1 ОВЕН ДТС045-100П.В3.120 | 100П (a=0.00391°C-1) | 03 | r.391 | 03 | 03 | 100П | 03 | нет | tY03 | tY03 | хх.03 | 0006 | ТС100П1.391 | 002 |
| ДТСХХ4 ДТСХХ5 | ОВЕН ДТС054-Pt100.В3.60/1 ОВЕН ДТС045-Pt100.В3.120 | Pt100 (a=0.00385°C-1) | 02 | r.385 | 02 | 02 | P100 | 07 | нет | tY02 | нет | хх.02 | 0005 | ТС100П1.385 | 001 |
| ДТСХХ5 | ОВЕН ДТС045-Рt500.В3.100 | Pt500 (a=0.00385°C-1) | 32 | нет | нет | нет | P500 | нет | нет | нет | нет | нет | нет | ТС500П1.385 | нет |
| ДТС3ххх | ОВЕН ДТС054-Pt1000.В3.60/1 | Pt1000 (a=0.00385°C-1) | 37 | нет | нет | нет | P1E3 | нет | нет | нет | нет | нет | нет | ТС1000П1.385 | нет |
| ДТПКХХ4 ДТПКХХ5 | ОВЕН ДТПК154-11.10 ОВЕН ДТПK045-0111.120 | К (ХА) | 05 | E__K | 05 | 06 | tP.HA | 05 | нет | tY05 | tY05 | нет | нет | ТПА | нет |
| ДТПLXX4 ДТПLXX5 | ОВЕН ДТПL154-11.10 ОВЕН ДТПL045-0111.120 | L (ХК) | 04 | E__L | 04 | 05 | tP.L | 04 | да | tY04 | tY04 | нет | нет | ТПК | нет |

Входы - служат для подключения к прибору различных типов датчиков;
Блок обработки входного сигнала - включает коррекцию показаний датчиков, цифровые фильтры, вычислители дополнительных величин (разности, отношения и т. п.);
Логические устройства (ЛУ) –формируют управляющие сигналы для выходных устройств;
Выходные устройства (ВУ) - служат для передачи регистрирующих или управляющих сигналов на исполнительные механизмы.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — наиболее эффективный и распространенный вид регулятора, обеспечивающий достаточно высокую точность при управлении различными процессами.
ПИД-регулятор вырабатывает выходной сигнал, который рассчитывается по следующей формуле: 
| Xp | полоса пропорциональности |
| Ei | рассогласование |
| τл | постоянная времени дифференцирования |
| ΔEi | разность между двумя соседними измерениями Ei и Ei-1 |
| Δtизм | время между двумя соседними измерениями Ti и Ti–1 |
| τи | постоянная времени интегрирования |
| ∑Ei | накопленная в i-й момент времени сумма рассогласований (интегральная сумма) |
Как видно из формулы, сигнал управления является суммой трех составляющих:
- пропорциональной (1-е слагаемое);
- интегральной (3-е слагаемое);
- дифференциальной (2-е слагаемое).
Пропорциональная составляющая зависит от рассогласования Ei и отвечает за реакцию на мгновенную ошибку регулирования.
Интегральная составляющая содержит в себе накопленную ошибку регулирования, которая является дополнительным источником выходной мощности и позволяет добиться максимальной скорости достижения уставки при отсутствии перерегулирования.
Дифференциальная составляющая зависит от скорости изменения параметра / , вызывающей реакцию регулятора на резкое изменение измеряемого параметра, возникшее, например, в результате внешнего возмущающего воздействия.
Для эффективной работы ПИД-регулятора необходимо подобрать для конкретного объекта регулирования значения коэффициентов ПИД-регулятора Xp, и . Это можно cделать вручную или воспользоваться автонастройкой.
Частные случаи ПИД-регулирования, поясняющие действие его составляющих:
- пропорциональное регулирование (П-закон, аналоговый П-регулятор)
- пропорционально-дифференциальное регулирование (ПД-закон)
- пропорционально-интегральное регулирование (ПИ-закон)
Измерители-регуляторы ОВЕН выпускаются с одним, двумя и восемью каналами измерения.
Модификации входов
Измерители-регуляторы УКТ38-В, УКТ38-Щ4, МПР51, ТРМ32, ТРМ33 имеют модификации входов для подключения отдельных групп датчиков (например ТС, ТП, АТ, АН и др., см. обозначение при заказе для конкретного прибора). Тип датчика устанавливается пользователем при программировании прибора. В многоканальных приборах ко всем входам подключаются датчики только одного типа.
Универсальные входы
Приборы 2ТРМ0, ТРМ1, 2ТРМ1, ТРМ10, ТРМ12 (новая линейка), ТРМ200, ТРМ201, ТРМ202, ТРМ210, ТРМ101, ТРМ501, ТРМ138, ТРМ138В, ТРМ148, ТРМ151, ТРМ251, ТРМ133 имеют универсальные входы, к которым можно подключать любые датчики, приведенные в таблице технических характеристик данного прибора. Тип датчика устанавливается пользователем при программировании прибора. В многоканальных приборах к разным входам можно подключать датчики различных типов.
Измерение температуры
Для измерения температур к входам приборов ОВЕН подключаются термопары, термопреобразователи сопротивления или любые другие датчики с унифицированным выходным сигналом. При этом при заказе прибора, не имеющего универсальных входов, необходимо правильно выбрать модификацию его входов.
Измерение расхода, давления и других физических величин
Приборы ОВЕН позволяют измерять расход, давление и пр. физические величины, для этого ко входам должны быть подключены датчики с унифицированным выходным сигналом тока или напряжения. Для вывода на индикатор реального значения параметра измеренный сигнал масштабируется.
Характеристики измерительных датчиков, подключаемых ко входам приборов ОВЕН
В таблицах приведен полный список датчиков, с которыми могут работать приборы ОВЕН, и указан максимальный диапазон измерения. Точный список подключаемых датчиков см. для каждого прибора в разделе «Технические характеристики».
Характеристики термопреобразователей сопротивления
| Тип датчика | W100 | α, °С-1 | Диапазон измерений |
| ТСМ (Cu50) | 1,426 | 0,00426 | -50...+200°С |
| ТСМ (50М) | 1,428 | 0,00428 | -190...+200°С |
| ТСП (Pt50) | 1,385 | 0,00385 | -200...+750°С |
| ТСП (50П) | 1,391 | 0,00391 | -200...+750°С |
| ТСМ (Cu100) | 1,426 | 0,00426 | -50...+200°С |
| ТСМ (100М) | 1,428 | 0,00428 | -190...+200°С |
| ТСП (Pt100) | 1,385 | 0,00385 | -200...+750°С |
| ТСП (100П) | 1,391 | 0,00391 | -200...+750°С |
| ТСН (Ni100) | 1,617 | 0,00617 | -60...+180°С |
| ТСМ (Cu500) | 1,426 | 0,00426 | -50...+200°С |
| ТСМ (500М) | 1,428 | 0,00428 | -190...+200°С |
| ТСП (Pt500) | 1,385 | 0,00385 | -200...+650°С |
| ТСП (500П) | 1,391 | 0,00391 | -200...+650°С |
| ТСН (Ni500) | 1,617 | 0,00617 | -60...+180°С |
| ТСМ (Cu1000) | 1,426 | 0,00426 | -50...+200°С |
| ТСМ (1000М) | 1,428 | 0,00428 | -190...+200°С |
| ТСП (Pt1000) | 1,385 | 0,00385 | -200...+650°С |
| ТСП (1000П) | 1,391 | 0,00391 | -200...+650°С |
| ТСН (Ni1000) | 1,617 | 0,00617 | -60...+180°С |
| ТСМ (53М) гр. 23 | 1,426 | 0,00426 | -50...+200°С |
W100 – отношение сопротивления датчика при 100 °С к его сопротивлению при 0 °С.
α– отношение разницы сопротивлений датчика, измеренных при температуре 100 и 0 °С, к его сопротивлению, измеренному при 0 °С (R0), деленное на 100 °С.
Параметр α соответствует новому ГОСТу на термопреобразователи сопротивления (ГОСТ Р 8.6252006), приведен в документации для новых приборов ОВЕН.
Характеристики термоэлектрических преобразователей (термопар)
| Тип датчика | Диапазон измерений |
| ТХK (L) | -200...+800°С |
| TXA (K) | -200...+1300°С |
| ТПП (S) | 0...+1750°С |
| ТПП (R) | 0...+1750°С |
| ТЖК (J) | -200...+1200°С |
| ТНН (N) | -200...+1300°С |
| ТПР (В) | +200...+18300°С |
| ТВР (А-1) | 0...+2500°С |
| ТВР (А-2) | 0...+1800°С |
| ТВР (А-3) | 0...+1600°С |
| ТМК (Т) | -200...+400°С |
Характеристики датчиков с унифицированным входным сигналом
| Тип датчика | Диапазон измерений |
| Сигнал тока: | |
| 0…5 мА | 0…100 % |
| 0…20 мА | 0…100 % |
| 4…20 мА | 0…100 % |
| Сигнал напряжения: | |
| -50...+50 мВ | 0…100 % |
| 0...1 В | 0…100 % |
Характеристики датчиков положения задвижек (д.п.з.)
| Тип датчика | Диапазон измерений |
| Резистивный д.п.з. (до 900 Ом) | 0…100 % |
| Токовый д.п.з. 0...20 мА или 4...20 мА | 0…100 % |
| Токовый д.п.з. 0...5 мА | 0…100 % |
Параметры линии для соединения прибора с датчиком
| Тип датчика | Максимальная длина линии | Максимальное сопротивление линии | Исполнение линии |
| ТСП, ТСМ | 100 м | 10,0 Ом | Трехпроводная, провода равной длины и сечения |
| Термопара | 20 м | 100 Ом | Термоэлектродный кабель (компенсационный) |
| Унифицированный ток | 100 м | 100 Ом | Двухпроводная |
| Унифицированное напряжение | 100 м | 5,0 Ом | Двухпроводная |
Подключение термопреобразователей сопротивления
Принцип работы термопреобразователей сопротивления (ТСМ, ТСП, ТСН, Pt100 и др.) основан на зависимости электрического сопротивления металлов от температуры. Термопреобразователи выполняют в виде катушки из тонкой медной или платиновой проволоки на каркасе из изоляционного материала, заключенной в защитную гильзу.
Термопреобразователи сопротивления характеризуются двумя параметрами: R0 — сопротивление датчика при 0 °С и W100 — отношение сопротивления датчика при 100 °С к его сопротивлению при 0 °С. В связи с введением нового ГОСТа на термопреобразователи сопротивления (ГОСТ Р 8.6252006) для новых приборов ОВЕН в документации вместо W100 приведен параметр α – отношение разницы сопротивлений датчика, измеренных при температуре 100 и 0 °С, к его сопротивлению, измеренному при 0 °С (R0), деленное на 100 °С.
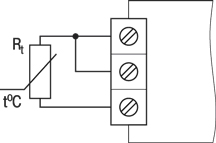 Для подключения термопреобразователей сопротивления к приборам ОВЕН используется трехпроводная схема, которая позволяет уменьшить погрешность измерения, возникающую при изменении сопротивления проводов (например, при изменении их температуры). К одному из выводов терморезистора Rt подсоединяются два провода, а третий подключается к другому выводу Rt.
Для подключения термопреобразователей сопротивления к приборам ОВЕН используется трехпроводная схема, которая позволяет уменьшить погрешность измерения, возникающую при изменении сопротивления проводов (например, при изменении их температуры). К одному из выводов терморезистора Rt подсоединяются два провода, а третий подключается к другому выводу Rt.
При этом необходимо соблюдать условие равенства сопротивлений всех трех проводов.
Термопреобразователи сопротивления могут подключаться к прибору с использованием двухпроводной линии, но при этом отсутствует компенсация сопротивления соединительных проводов и поэтому будет наблюдаться некоторая зависимость показаний прибора от колебаний температуры проводов.
Подключение термопар
Термопара (термоэлектрический преобразователь) типа ТХА, ТХК, ТПП и пр. состоит из двух спаянных на одном из концов проводников, изготовленных из металлов, обладающих разными термоэлектрическими свойствами.
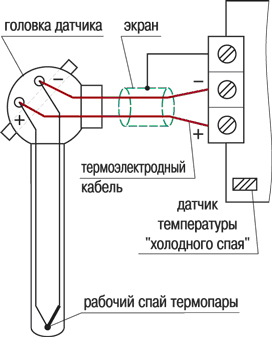 Спаянный конец, называемый «рабочим спаем», погружается в измеряемую среду, а свободные концы («холодный спай») термопары подключаются ко входу измерителей-регуляторов. Если температуры «рабочего» и «холодного спаев» различны, то термопара вырабатывает термоЭДС, которая и подается на прибор.
Спаянный конец, называемый «рабочим спаем», погружается в измеряемую среду, а свободные концы («холодный спай») термопары подключаются ко входу измерителей-регуляторов. Если температуры «рабочего» и «холодного спаев» различны, то термопара вырабатывает термоЭДС, которая и подается на прибор.
Поскольку термоЭДС зависит от разности температур двух спаев термопары, то для получения корректных показаний необходимо знать температуру «холодного спая», чтобы скомпенсировать эту разницу в дальнейших вычислениях.
В модификациях входов, предназначенных для работы с термопарами, предусмотрена схема автоматической компенсации температуры свободных концов термопары. Датчиком температуры «холодного спая» служит полупроводниковый диод, установленный рядом с присоединительным клеммником.
Подключение термопар к прибору должно производиться с помощью специальных компенсационных (термоэлектродных) проводов, изготовленных из тех же материалов, что и термопара. Допускается использовать провода из металлов с термоэлектрическими характеристиками, аналогичными характеристикам материалов электродов термопары в диапазоне температур 0…100 °С. При соединении компенсационных проводов с термопарой и прибором необходимо соблюдать полярность.
Во избежание влияния помех на измерительную часть прибора линию связи прибора с датчиком рекомендуется экранировать. В качестве экрана может быть использована заземленная стальная труба.
При нарушении указанных условий могут иметь место значительные погрешности при измерении.
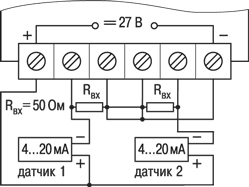
Подключение датчиков с унифицированным выходным сигналом тока или напряжения
Многие датчики различных физических величин оснащены нормирующими измерительными преобразователями. Нормирующие преобразователи преобразуют сигналы с первичных (термопар, термопреобразователей сопротивления, манометров, дифманометров и др.) в унифицированный сигнал постоянного тока или напряжения с диапазонами: 0...20 мА, 4...20 мА, 0...5 мА или 0...1 В. Диапазон выходного тока нормирующего преобразователя пропорционален значению физической величины, измеряемой датчиком, и соответствует рабочему диапазону датчика, указанному в его технических характеристиках.
В ряде приборов ОВЕН имеется встроенный источник питания постоянного тока, гальванически изолированный от схемы прибора.
Схема подключения датчиков с унифицированным выходным сигналом 4...20 мА по двухпроводной линии к прибору 2ТРМ1:

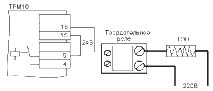
Измерение влажности психрометрическим методом
Психрометрический метод основан на измерении разности температур сухого и влажного термометров. Температура влажного термометра всегда ниже температуры сухого из-за испарения воды с поверхности фитиля. Чем суше воздух (влажность ниже), тем интенсивнее испаряется вода с поверхности фитиля, тем ниже температура увлажняемого термометра.
Существуют полуэмпирические психрометрические формулы, из которых выведена
|
|
| общепринятая формула относительной влажности: φ — относительная влажность воздуха, %; Евлаж. — максимально возможное парциальное давление водяного пара при температуре воздуха Твлаж., °С; Есух. — максимально возможное парциальное давление водяного пара при температуре воздуха Тсух., °С; р — атмосферное давление; Тсух. — температура сухого термометра, °С; Твлаж. — температура влажного термометра, °С; A — психрометрический коэффициент (психрометрическая постоянная). |

Психрометрический коэффициент A зависит от многочисленных факторов:
- размера и формы чувствительного элемента увлажнённого термометра;
- вида и состояния смачиваемого фитиля;
- температуры смачивающей воды и теплопроводности фитиля;
- влияния тепловой радиации.
Среди внешних факторов наибольшее значение имеет скорость воздушного потока, обдувающего увлажненный термометр. Если она больше 2,5 м/сек, то коэффициент A приближается к величине ~0,0064 1/°С. Если обдува нет, то коэффициент A сильно возрастает, поэтому рекомендуется устанавливать принудительную вентиляцию. В приборах ОВЕН значение A устанавливается пользователем — например, в МПР51 допускаются значения 0,0064...0,008 1/°С.
«Сухой» и «влажный» датчики температуры следует крепить один над другим на расстоянии 50...100 мм:


Под «влажным» датчиком помещается резервуар с водой, в который опускается увлажняющий фитиль, закрывающий датчик. Резервуар изготавливается из нержавеющей стали, оцинкованного железа, термостойкой пластмассы, стекла или другого стойкого к условиям эксплуатации материала, не выделяющего вредных вещества. Увлажняющий фитиль чаще всего изготавливается из тонкой неотбеленной хлопчатобумажной ткани — марли, батиста, муслина, обладающих максимальной всасывающей способностью. Фитиль должен закрывать чувствительный элемент и максимальную площадь поверхности датчика.


Установка диапазона измерения при использовании датчиков с унифицированным выходным сигналом постоянного тока или напряжения (масштабирование)
При работе с датчиками, формирующими на выходе унифицированный сигнал тока или напряжения, в измерителях регуляторах ОВЕН предусматривается возможность масштабирования шкалы измерения по каждому из каналов. Для этого в соответствующих параметрах программирования прибора устанавливаются нижняя и верхняя границы диапазона измерения, а также положение десятичной точки.
Параметр «нижняя граница диапазона измерения» определяет, какое значение будет выводиться на индикатор при минимальном уровне сигнала с датчика (например, при 4 мА для датчика с выходным сигналом тока 4...20 мА).
Параметр «верхняя граница диапазона измерения» определяет, какое значение будет выводиться на индикатор при максимальном уровне сигнала с датчика (например, при 20 мА для датчика с выходным сигналом тока 4...20 мА или 1 В для датчика с выходным сигналом напряжения 0...1 В).
Параметр «положение десятичной точки» определяет количество знаков после запятой, которое будет выводиться на индикатор.
Логические устройства (ЛУ), в соответствии с заданными пользователем параметрами, формируют сигналы управления, которые через выходные устройства прибора (реле, транзисторные ключи и т. п.) подаются на исполнительные механизмы.
В измерителях-регуляторах ОВЕН ТРМ1, 2ТРМ1, ТРМ201, ТРМ202 пользователь имеет возможность задавать входную величину и режим работы логических устройств:
- двухпозиционный регулятор (ON/OFF, компаратор);
- аналоговый П-регулятор;
- измеритель-регистратор.
При этом режим работы ЛУ и тип выходного устройства, определяемый при заказе, должны обязательно соответствовать друг другу.
Другие измерители-регуляторы ОВЕН обычно содержат основное логическое устройство – регулятор (или несколько регуляторов), который может работать в режиме ПИД или ON/OFF. Также каждый канал регулирования может включать в себя дополнительные устройства:
- двухпозиционный (ON/OFF) регулятор, который используется для сигнализации или аварийного отключения оборудования;
- регистратор (то же, что измеритель-регистратор в ОВЕН ТРМ1).
Логические устройства в приборах ОВЕН
| Режим работы логического устройства | Тип выхода |
| Двухпозиционный регулятор (ON/OFF, компаратор) | дискретный (Р, К, С, Т, С3) |
| Аналоговый П-регулятор | аналоговый: ЦАП 4...20 мА (И) или 0...10 В (У) |
| ПИД-регулятор | дискретный (Р, К, С, Т, С3) или аналоговый (И, У) |
| Регистратор (измеритель-регистратор) | ЦАП 4...20 мА (И) |
В блоке обработки входного сигнала осуществляется коррекция и цифровая фильтрация измеренных значений, а также вычисление дополнительных параметров.
Коррекция измерений (компенсация погрешности датчиков)
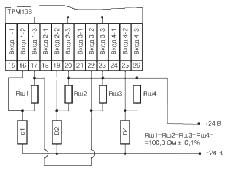
Для устранения начальной погрешности преобразования входных датчиков и погрешностей, вносимых соединительными проводами, измеренное значение может быть откорректировано. В большинстве приборов ОВЕН существует два типа коррекции, позволяющих осуществлять сдвиг или изменение наклона измерительной характеристики на заданную величину.
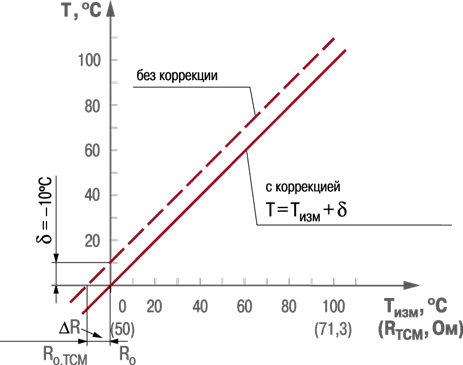
Пример для датчика ТСМ50, W100 = 1,426 ( = 0,00426).
К каждому вычисленному значению параметра прибавляется заданное пользователем значение.
Коррекция «сдвиг характеристики» используется для компенсации погрешностей, вносимых сопротивлениями подводящих проводов, и погрешностей, возникающих из-за разброса входных сопротивлений 1-го и 2-го каналов измерения (при использовании датчиков с выходным сигналом 0(4)...20 мА, 0...5 мА).
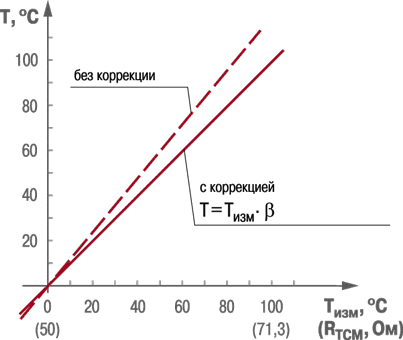
Пример для датчика ТСМ50, W100 = 1,426 ( = 0,00426).<
Значение температуры умножается на заданный пользователем поправочный коэффициент в пределах 0,900…1,100.
Коррекция «наклон характеристики» используется для компенсации погрешностей датчиков (при отклонении значения W100 у термопреобразователей сопротивления) и погрешностей, возникающих из-за разброса входных сопротивлений различных каналов измерения (при использовании датчиков с унифицированными выходными сигналами).
Цифровая фильтрация измерений
Цифровая фильтрация входного сигнала уменьшает влияние случайных импульсных помех на показания. В большинстве измерителей-регуляторов ОВЕН предусмотрена двухступенчатая фильтрация: «полосовая», устраняющая значительные единичные помехи, и «сглаживающая», снижающая действие небольших высокочастотных помех.
Первая ступень фильтрации описывается параметром «полоса фильтра», вторая — параметром «глубина фильтра» или «постоянная времени фильтра».
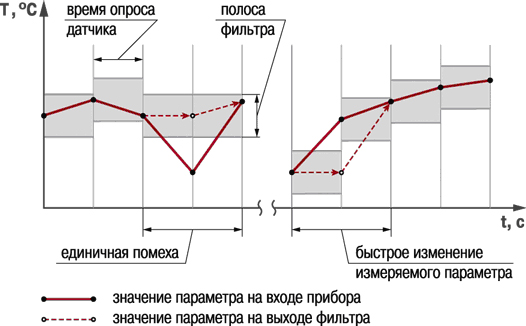
Параметр «полоса фильтра» позволяет защитить измерительный тракт от единичных помех. Полоса фильтра задается в единицах измеряемой величины. Если показание отличается от предыдущего измеренного значения более чем на величину, установленную в этом параметре, то оно игнорируется, и прибором производится повторное измерение. На цифровом индикаторе остается значение предыдущего измерения.
Как видно из рисунка, малая ширина полосы фильтра приводит к замедлению реакции прибора на быстрое изменение входной величины. Поэтому при низком уровне помех или при работе с быстроменяющимися процессами рекомендуется увеличить значение параметра или отключить действие фильтра. В случае работы в условиях сильных помех для устранения их влияния на работу прибора необходимо уменьшить значение параметра. При этом возможно ухудшение быстродействия прибора из-за повторных измерений.
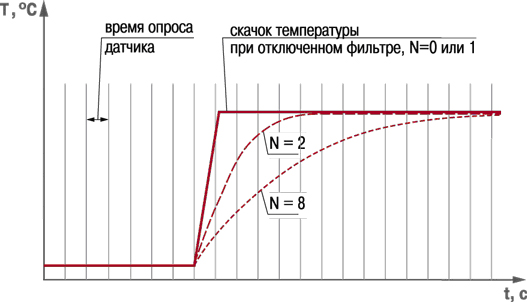
Параметр «глубина фильтра» позволяет добиться более плавного изменения показаний прибора. В этом параметре задается количество N последних измерений, из значений которых прибор вычисляет среднее арифметическое. Полученная величина используется прибором в дальнейшей работе.
Вид переходных характеристик фильтра для разных значений N показан на рисунке. Уменьшение значения глубины фильтра приводит к более быстрой реакции прибора на скачкообразные изменения контролируемой величины, но снижает помехозащищенность прибора. Увеличение значения приводит к улучшению помехозащищенности, но вместе с этим повышает инерционность прибора. 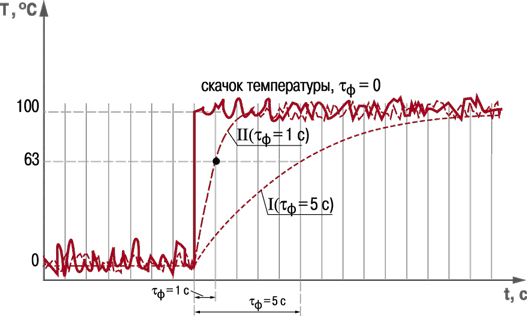
Параметр «постоянная времени фильтра» τФ позволяет осуществлять экспоненциальное сглаживание. Постоянной времени фильтра называют интервал, в течение которого выходной сигнал достигает 0,63 от величины окончательного значения (100 °С).
На рисунке показана реакция фильтра на единичный скачок температуры при различных τФ. Большое значение постоянной времени фильтра приводит к замедлению реакции прибора на изменение входной величины, но помехи значительно подавлены (кривая I). Малые значения постоянной времени фильтра позволяют довольно точно отслеживать изменения входной величины, но уровень помех практически не уменьшается (кривая II).
Вычисление дополнительных величин
В ряде измерителей-регуляторов ОВЕН предусмотрена возможность вычисления дополнительных величин (помимо измеряемых) и их поддержания.
Например, в 2ТРМ1 есть вычислитель разности входных сигналов. Значение разности прибор может регулировать. Наиболее часто эта возможность применяется для регулирования влажности: прибор поддерживает значение разности температур, установленное по психрометрической таблице в соответствии с необходимым значением влажности.
МПР51 имеет вычислитель влажности с заложенными значениями психрометрической таблицы, что позволяет поддерживать непосредственно влажность.
2ТРМ1 имеет вычислитель квадратного корня (при работе с унифицированными аналоговыми сигналами), который может преобразовывать квадратичную характеристику дифманометра в линейную.
Приборы ТРМ151 и ТРМ148 могут вычислять целый ряд функций от величин, измеренных на входах:
- относительную влажность психрометрическим методом;
- квадратный корень из измеренной величины;
- разность измеренных величин;
- среднее арифметическое измеренных величин;
- минимальное и максимальное значения измеренных величин;
- взвешенную сумму и частное измеренных величин.
Двухпозиционный регулятор (компаратор) сравнивает значение измеренной величины с эталонным (уставкой). Состояние выходного сигнала изменяется на противоположное, если входной сигнал (измеренная величина) пересекает пороговый уровень (уставку).
В режиме двухпозиционного регулятора (компаратора) ЛУ сравнивает значение входной величины с уставками и выдает управляющий сигнал на выходное устройство в соответствии с заданной логикой.
Выходной сигнал двухпозиционного регулятора может иметь только два значения: максимальное и минимальное. Одно из них включает, а другое выключает выходное устройство.
Поэтому для работы ЛУ в режиме двухпозиционного регулятора требуется выходное устройство дискретного типа (э/м реле, транзисторная оптопара, оптосимистор, выход для управления внешним твердотельным реле).
Тип логики двухпозиционного регулятора, уставка Туст. и гистерезис Δ задаются пользователем при программировании прибора.
Двухпозиционный регулятор используется:
- для регулирования измеренной величины в несложных системах, когда не требуется особой точности;
- для сигнализации о выходе контролируемой величины за заданные границы.
Типы логики двухпозиционного регулятора (ON/OFF, компаратора)
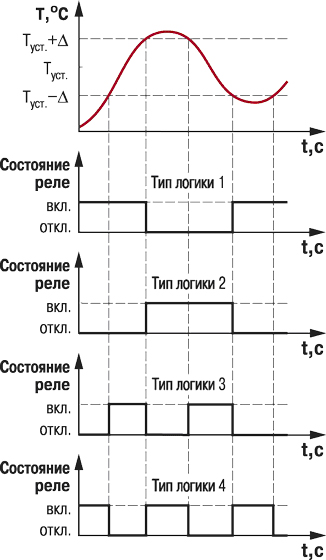
В приборах ОВЕН реализованы 4 типа логики двухпозиционного регулятора (ON/OFF, компаратора)
Тип логики 1 (прямой гистерезис)
Применяется в случае использования прибора для управления работой нагревателя (например, ТЭНа) или сигнализации о том, что значение текущего измерения Т меньше уставки Туст. При этом выходное устройство, подключенное к ЛУ, первоначально включается при значениях Т<Туст– , выключается при Т>Tуст+Δ и вновь включается при Т<Туст–Δ , осуществляя тем самым двухпозиционное регулирование температуры объекта по уставке Туст с гистерезисом ±Δ.
Тип логики 2 (обратный гистерезис)
Применяется в случае использования прибора для управления работой охладителя (например, вентилятора) или сигнализации о превышении значения уставки. При этом выходное устройство первоначально включается при значениях Т>Tуст+Δ , выключается при Т<Туст–Δ и вновь включается при Т>Tуст+Δ , также осуществляя двухпозиционное регулирование.
Тип логики 3 (П-образная)
Применяется при использовании прибора для сигнализации о входе контролируемой величины в заданные границы. При этом выходное устройство включается при Туст–Δ <Т<Tуст+Δ.
Тип логики 4 (U-образная)
Применяется при использовании прибора для сигнализации о выходе контролируемой величины за заданные границы. При этом выходное устройство включается при Т<Туст– Δи Т>Tуст+ Δ.
Задержка включения и выключения выходного устройства
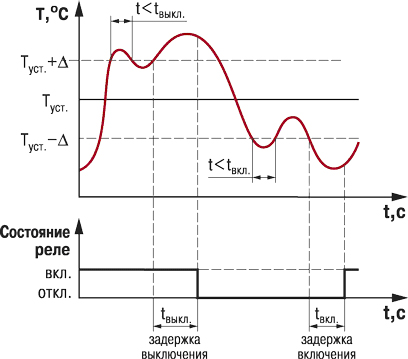 Для защиты выходного устройства от частых срабатываний при работе ЛУ в режиме компаратора, во многих приборах ОВЕН (например ТРМ1, 2ТРМ1, МПР51, ТРМ138) имеются параметры для установки времени задержки включения tвкл и времени задержки выключения tвыкл выходного устройства. ЛУ включает (выключает) выходное устройство, если условие, вызывающее изменение состояния, сохраняется, как минимум, в течение времени, установленного в этих параметрах.
Для защиты выходного устройства от частых срабатываний при работе ЛУ в режиме компаратора, во многих приборах ОВЕН (например ТРМ1, 2ТРМ1, МПР51, ТРМ138) имеются параметры для установки времени задержки включения tвкл и времени задержки выключения tвыкл выходного устройства. ЛУ включает (выключает) выходное устройство, если условие, вызывающее изменение состояния, сохраняется, как минимум, в течение времени, установленного в этих параметрах.
Удержание выходного устройства в замкнутом и разомкнутом состоянии в течение заданного времени
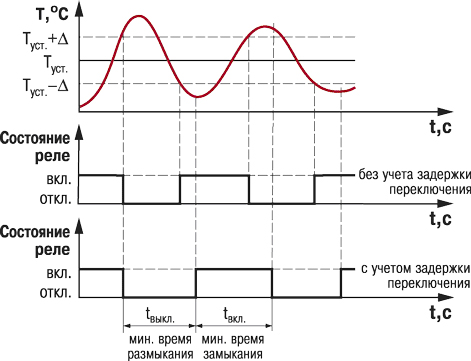 Для аварийной сигнализации о выходе параметра за установленные границы во многих приборах ОВЕН (например ТРМ1, 2ТРМ1, ТРМ138) можно задать минимальное время удержания выхода в замкнутом и разомкнутом состоянии. ЛУ удерживает выходное устройство в соответствующем состоянии в течение заданного времени, даже если по логике работы устройства сравнения требуется переключение.
Для аварийной сигнализации о выходе параметра за установленные границы во многих приборах ОВЕН (например ТРМ1, 2ТРМ1, ТРМ138) можно задать минимальное время удержания выхода в замкнутом и разомкнутом состоянии. ЛУ удерживает выходное устройство в соответствующем состоянии в течение заданного времени, даже если по логике работы устройства сравнения требуется переключение.
РЕГУЛЯТОР — устройство, предназначенное для поддержания контролируемой величины на заданном уровне.
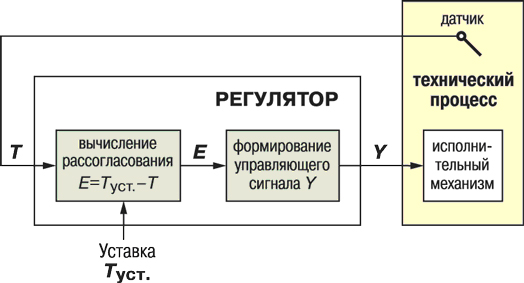
Схема работы регулятора аналогового типа
В режиме аналогового регулирования ЛУ рассчитывает отклонение E текущего значения контролируемой величины T от заданной уставки Tуст. (т. е. рассогласование). В результате на выходе регулятора вырабатывается аналоговый сигнал Y, который направлен на уменьшение рассогласования E. Этот сигнал подается на исполнительное устройство регулятора в виде тока или последовательности импульсов (ШИМ).
Если выходное устройство регулятора дискретного типа (реле, транзисторная или симисторная оптопара, выход для управления твердотельным реле), выходной сигнал преобразуется в последовательность управляющих импульсов с длительностью D (см. рисунок):
|
|
| D – длительность импульса, с; Тсл – период следования импульсов, с (задается пользователем при программировании); Y – выходной сигнал регулятора. Если в качестве выходного устройства используется ЦАП, выходной сигнал преобразуется в пропорциональный ему ток 4...20 мА или напряжение 0...10 В. |

Принцип ШИМ
В выходных импульсах присутствуют все три составляющие ПИД - пропорциональная, дифференциальная, интегральная.
ПИД-регулятор (пропорционально-интегрально-дифференциальный) – наиболее эффективный и распространенный вид регулятора, обеспечивающий достаточно высокую точность при управлении различными процессами.
Пропорциональное регулирование (П-закон)
Аналоговый П-регулятор (см. ЛУ в приборах ТРМ1, 2ТРМ1, ТРМ201, ТРМ202)
При цифровой реализации П-закона регулирования выходной сигнал регулятора Yi пропорционален величине рассогласования Ei, т. е.
|
|
| Xp - полоса пропорциональности, в пределах которой справедлива эта формула Ei - разность между заданным Туст и текущей Тi значениями измеряемой величины, или рассогласование |
")
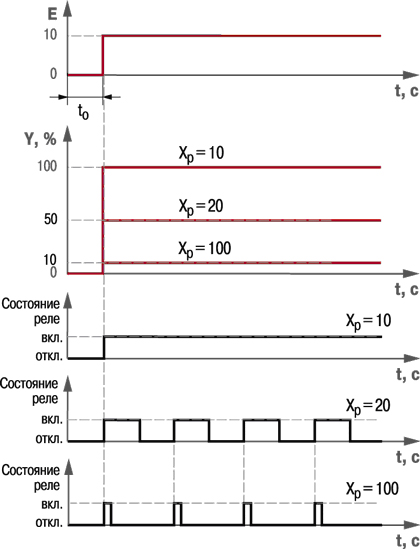
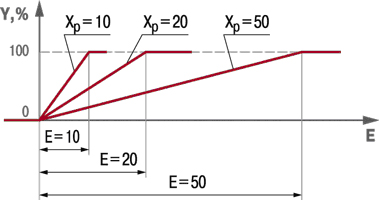
Полоса пропорциональности Xp, как и отклонение E, выражается в единицах контролируемого параметра. Чем шире полоса пропорциональности Xp, тем меньше величина выходного сигнала Y при одном и том же отклонении E.
Вне полосы пропорциональности выходной сигнал Y равен 0 или 100 %.
При действии П-закона регулятор выдает импульсы, в которых присутствует только пропорциональная составляющая величины выходного сигнала.
Пропорционально-дифференциальное регулирование (ПД-закон)
При работе прибора в режиме ПД-регулятора величина выходного сигнала Yi зависит не только от величины отклонения Ei, но и от скорости его изменения:
|
|
| Xp- полоса пропорциональности Ei - рассогласование τл- постоянная времени дифференцирования ΔEi - разность между двумя соседними измерениями Ei и Ei-1 Δtизм - время между двумя соседними измерениями Ti и Ti–1 ΔEi / Δtизм - скорость изменения рассогласования Ei |
")
Изменение выходного сигнала регулятора при ступенчатом изменении отклонения показано на рисунке. В первый период после ступенчатого изменения Ei регулятор выдает управляющий импульс, в котором, кроме пропорциональной составляющей, вызванной рассогласованием Ei, добавляется дифференциальная (заштрихованная часть) ΔYд, которая зависит от величины ΔEi и τл коэффициента . В последующих импульсах присутствует только пропорциональная составляющая, так как нет изменения Ei.
 Выходной сигнал ПД-регулятора и длительность управляющих импульсов при различных значениях и E=10
Выходной сигнал ПД-регулятора и длительность управляющих импульсов при различных значениях и E=10
Пропорционально-интегральное регулирование (ПИ-закон)
При работе прибора в режиме ПИ-регулятора величина выходного сигнала Yi зависит как от величины отклонения Ei, так и от суммы предыдущих рассогласований:
|
|
| Xp - полоса пропорциональности Ei - рассогласование τи - постоянная времени интегрирования ∑Ei - накопленная в i-й момент времени сумма рассогласований (интегральная сумма) |
")
Из рисунка видно, что в первый момент времени, когда нет отклонения (Ei=0), нет и выходного сигнала (Yi=0). С появлением отклонения Ei появляются импульсы, длительность которых постепенно увеличивается. В импульсах присутствует пропорциональная составляющая, которая зависит от величины E (незаштрихованная часть импульсов) и интегральная составляющая (заштрихованная часть). Увеличение длительности импульсов происходит за счет роста интегральной составляющей, которая зависит от рассогласования Ei и коэффициента τи.
 Выходной сигнал ПИ-регулятора и длительность управляющих импульсов при различных значениях и E=10
Выходной сигнал ПИ-регулятора и длительность управляющих импульсов при различных значениях и E=10
Зона нечувствительности Xd
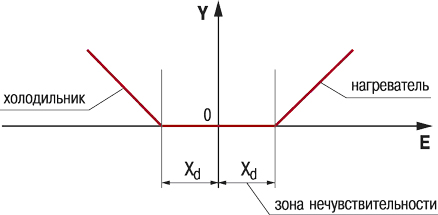
Для исключения излишних срабатываний регулятора при небольшом значении рассогласования Ei для вычисления значений Yi используется уточненное значение Ep, вычисленное в соответствии с условиями:
если |Ei | ≤ Xd, то Ep = 0;
если Ei > Xd, то Ep = Ei – Xd;
если Ei < –Xd, то Ep = Ei + Xd,
где Xd — зона нечувствительности.
Прибор будет выдавать управляющий сигнал только после того, как регулируемая величина выйдет из этой зоны. Зона нечувствительности не должна превышать необходимую точность регулирования.
Зона нечувствительности
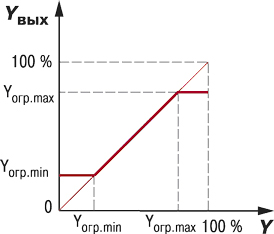
Ограничение управляющего сигнала
Так как рабочий диапазон исполнительного механизма всегда ограничен, для выходного управляющего сигнала Yвых задаются ограничения в виде максимального и минимального значений. Если выходной сигнал регулятора Y превышает заданную величину Yогр.max, то на исполнительное устройство выдается сигнал Yогр.max, если сигнал меньше заданной величины Yогр.min, то выдается сигнал Yогр.min.
Кроме того, в некоторых регуляторах можно задать скорость изменения выходного сигнала, что позволяет избежать резких воздействий на исполнительные устройства.
Ограничение управляющего сигнала
Зона накопления интеграла
Если рассогласование Е долго сохраняет знак, величина интегральной составляющей становится очень большой (эффект интегрального насыщения), что может привести к перерегулированию.
Для устранения влияния этого эффекта задают зону накопления интеграла, в пределах которой регулятор вычисляет интегральную составляющую. За пределами этой зоны, где интегральная сумма слишком велика, для формирования управляющего сигнала используется только пропорциональная составляющая. В зависимости от режима работы регулятора (нагреватель или холодильник), эта зона расположена выше или ниже уставки. Если регулятор управляет задвижкой без датчика положения, значение этого параметра не влияет на работу регулятора.
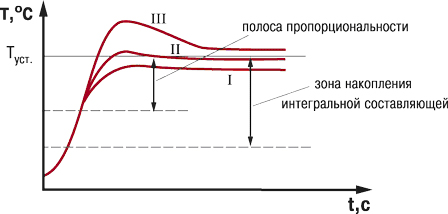
I – П-регулятор
II – ПИ-регулятор с ограничением накопления интегральной составляющей
III – ПИ-регулятор без ограничения интегральной составляющей
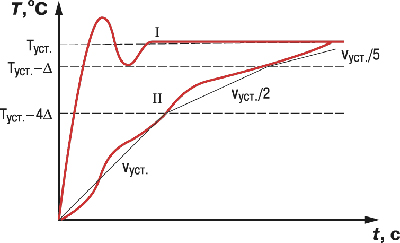
Ограничение скорости выхода на уставку
Ограничение скорости выхода контролируемой величины на заданное значение используется для предотвращения перерегулирования при запуске системы (кривая I). Фиксированное значение уставки заменяют на «плавающее», которое постепенно приближают к значению Туст. (кривая II). Приближение происходит сначала со скоростью vуст. , затем скорость постепенно уменьшается (см. рис.). Рекомендуемое значение vуст. определяется прибором при автонастройке и обеспечивает первоначальную величину перерегулирования (первого «выбега») не более Δ.
При использовании скорости выхода на уставку возрастает время выхода на рабочий режим. Поэтому если задержка приводит к неудовлетворительным результатам, нужно увеличить vуст. или отключить действие параметра.
Ограничение скорости выхода на уставку
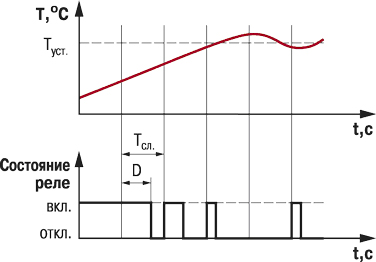
Период управляющих импульсов Tсл
При использовании ПИД-регулятора с выходным устройством ключевого типа (э/м реле, транзисторная или симисторная оптопара) необходимо устанавливать период управляющих импульсов. Чем выше частота управляющих импульсов (т. е. меньше период Тсл.), тем быстрее реакция регулятора на внешние возмущения.
В идеале частота импульсов управления должна совпадать с частотой опроса датчика. Однако, если при использовании на выходе ПИД-регулятора электромагнитного реле или пускателя установить слишком большую частоту (т. е. слишком низкое значение Тсл.), то частые переключения приведут к быстрому износу силовых контактов.
Поэтому значение Тсл. приходится увеличивать, но необходимо понимать, что качество регулирования при этом может ухудшиться.
При использовании в качестве выходных устройств электронных ключей (транзисторных или симисторных оптопар) проблемы износа контактов не возникает и значение Тсл можно установить равным периоду опроса датчика (например, для ТРМ101 1...2 с).
Автонастройка позволяет определять значение Тсл, которое не будет оказывать отрицательного влияния на работу системы.
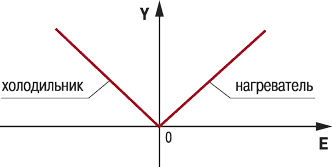
Для поддержания заданного значения регулируемого параметра при работе ЛУ в режиме «Регулятор» можно использовать разные типы исполнительных устройств, но все они могут быть условно разделены на две группы:
- нагреватели;
- холодильники.
Нагревателем условно называют устройство, включение которого должно приводить к увеличению значения измеряемого параметра.
Холодильником называют устройство, включение которого должно приводить к уменьшению значения измеряемого параметра.
Кроме того, в некоторых ПИД-регуляторах ОВЕН существует специальный режим для управления устройствами типа «задвижка». Задвижка, в свою очередь, тоже может управлять либо нагревателем, либо холодильником.
Нагреватель
Управление процессом при помощи устройств данного типа предполагает, что с увеличением значения выходного сигнала Y увеличивается значение регулируемого параметра.
Выходной сигнал регулятора и временная диагарамма выходного реле при ШИМ-управлении нагревателем
Холодильник
Управление процессом при помощи устройств данного типа предполагает, что с увеличением значения выходного сигнала Y уменьшается значение регулируемого параметра.
Одновременное управление нагревателем и холодильником
Для поддержания регулируемой величины регулятор управляет двумя исполнительными устройствами - нагревателем и холодильником. Если в момент включения регулятора значение регулируемого параметра меньше заданного, регулятор включает нагреватель и использует это устройство до тех пор, пока величина выходного сигнала Y не поменяет знак на противоположный. После этого регулятор включает холодильник.
Управление нагревателем и холодильником
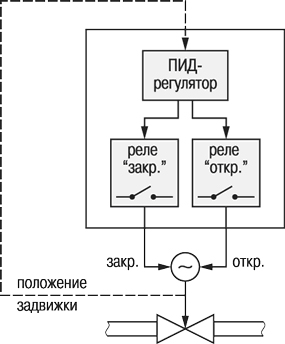
Особенности работы ПИД-регулятора при управлении задвижкой (позиционно-пропорциональное регулирование)
Устройство типа «задвижка» имеет электрический привод и две пары контактов для управления направлением ее вращения. Это устройство управляется только импульсными сигналами. При подаче управляющих импульсов на первую пару контактов задвижка перемещается в одну сторону, например, открывается, при подаче импульсов на вторую – закрывается.
Если задвижка имеет датчик положения, то регулятор вычисляет выходной сигнал Yi (положение задвижки в процентах) и перемещает задвижку в нужное положение. При вычислении Yi в формулу для ПИД-регулятора вносятся коррективы. Считается, что двигатель задвижки – это «интегрирующее звено», и регулятором производится дополнительное дифференцирование выходного сигнала. В этом случае постоянная времени дифференцирования τд не учитывается, даже если она была ранее установлена. Пропорциональная и интегральная составляющие действуют так же, как при управлении нагревателем (холодильником).
Если датчик положения отсутствует, то регулятор вычисляет среднюю скорость перемещения задвижки vср. по формуле:
|
|
| Xp - полоса пропорциональности Ei - рассогласование (отклонение) ΔEi - разность между двумя соседними измерениями Ei и Ei-1 τи - постоянная времени интегрирования |

Если vср.vср.>0, то на реле «откр.». Длительность управляющих импульсов при этом определяется по формуле:
|
|
| D - длительность импульсов Тсл - период следования импульсов |

Задвижка может работать и в режиме нагревателя, и в режиме холодильника. На рис. 2 показана диаграмма работы выходных реле при работе задвижки в режиме нагревателя.

Автоматическая настройка (автонастройка) предназначена для оптимальной настройки системы регулирования непосредственно на объекте.
Автонастройка в приборах ОВЕН может включать два этапа:
- предварительной настройки регулятора;
- точной настройки регулятора, или настройки в процессе эксплуатации системы на объекте.
Этап предварительной настройки имеют все ПИД-регуляторы ОВЕН. Точную настройку можно проводить для приборов нового поколения (например, ТРМ101).
Предварительная настройка
Из полученных значений амплитуды и периода автоколебания прибор вычисляет приближенные значения коэффициентов ПИД-регулятора (Xp, и, д) для данной системы. Предварительная настройка позволяет обеспечить работоспособность системы регулирования при найденных значениях параметров.
Кроме того, в процессе предварительной настройки прибор может определять постоянную времени входного сглаживающего фильтра τФ, период следования управляющих импульсов ШИМ Тсл и оптимальную скорость выхода на уставку Vуст. Также прибор определяет амплитуду ,Δ с которой будут совершаться колебания при проведении точной автонастройки.
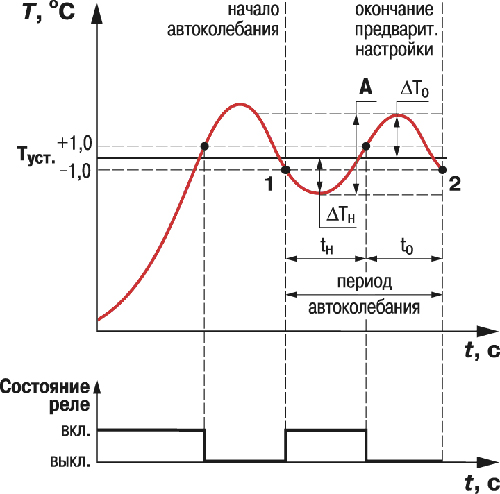
Прибор работает как двухпозиционный регулятор. При запуске системы первый пик амплитуды пропускается, а для первого целого колебания (между точками 1 и 2 на рисунке) прибор определяет амплитуду A и период этого колебания как сумму tн + tо (см. рис.).
Точная настройка
Для уточнения настройки системы и ее подстройки в процессе эксплуатации проводится точная автонастройка Δ. Для точной автонастройки необходима предварительная информация о системе, которую получают в ходе предварительной настройки.
В процессе точной автонастройки регулятор возбуждает колебания входной величины вокруг уставки с амплитудой Δ. Значение Δ должен задать пользователь, исходя из свойств системы. Рекомендуется задавать значение Δ, которое прибор определил при предварительной настройке. В любом случае значение Δ должно быть не меньше амплитуды колебаний A, вычисленной в процессе предварительной настройки.
Пользователь должен задать также отношение τд/ τи. Чем меньше значение этого параметра, тем меньше будет влияние дифференциальной составляющей ПИД-регулятора на процесс регулирования. Значение τд/ τи, установленное на заводе изготовителе по умолчанию, обычно является удовлетворительным.
Точная автонастройка производится методом последовательного приближения значений параметров регулятора к оптимальным. Прибор запускает синусоидальные колебания и пересчитывает коэффициенты ПИД-регулятора Xp, τи, τд до тех пор, пока характеристики практически возбуждаемых колебаний не будут соответствовать расчетным.
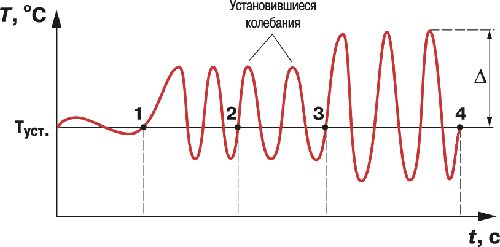
Т. 1 Начало точной настройки
Т. 2 Возбуждение колебаний
с первоначальными значениями Xp, τ и, τд
Т. 3 Пересчет коэффициентов
ПИД-регулятора.
Колебания с рассчитанными Xp, τи, τд
Т. 4 Окончание точной настройки.
Запись новых Xp, τи, τд
Измеритель-регистратор (или просто Регистратор) — устройство, предназначенное для преобразования измеренной величины в аналоговый сигнал тока 4...20 мА.
При работе в режиме «измеритель-регистратор» ЛУ преобразует входную величину в аналоговый сигнал в виде тока 4…20 мА, который можно подавать на самописец или другое регистрирующее устройство.
Тип соответствующего измерителю выходного устройства — «И» — цифроаналоговый преобразователь «параметр–ток 4...20 мА».
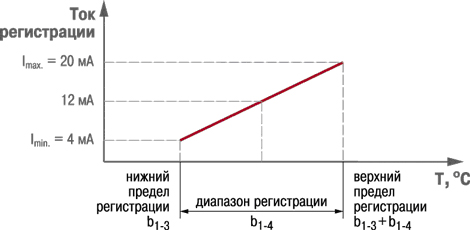
Принцип формирования тока регистрации
При программировании прибора устанавливаются два параметра. Первый параметр — значение нижнего предела, соответствующее минимальному значению тока. Вторым параметром для разных приборов ОВЕН может быть либо диапазон регистрации, либо значение верхнего предела, соответствующее максимальному значению тока.
Выходные устройства (ВУ) предназначены для передачи выходного управляющего сигнала на исполнительные механизмы либо для передачи данных на регистрирующее устройство.
Выходные устройства дискретного (ключевого) типа
К выходным устройствам дискретного (ключевого) типа относятся:
- электромагнитное реле;
- транзисторная оптопара;
- симисторная оптопара;
- выход для управления внешним твердотельным реле.
Выходное устройство ключевого типа используется для управления (включения/выключения) нагрузкой либо непосредственно, либо через более мощные управляющие элементы, такие как пускатели, твердотельные реле, тиристоры или симисторы.
Цепи ключевых выходных устройств имеют гальваническую изоляцию от схемы прибора. Исключение составляет выход «Т» для управления внешним твердотельным реле. В этом случае гальваническую изоляцию обеспечивает само твердотельное реле.
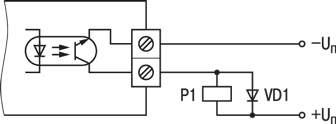
Транзисторная оптопара (выход «К»)
Транзисторная оптопара применяется, как правило, для управления низковольтным электромагнитным или твердотельным реле (до 60 В постоянного тока). Схема включения приведена на рис. 1. Во избежание выхода из строя транзистора из-за большого тока самоиндукции параллельно обмотке реле Р1 необходимо устанавливать диод VD1, рассчитанный на ток 1 А и напряжение 100 В.
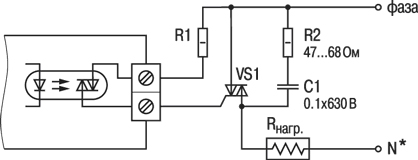
 Симисторная оптопара (выход «С»)
Симисторная оптопара (выход «С»)
Оптосимистор включается в цепь управления мощного симистора через ограничивающий резистор R1 по схеме, приведенной на рис. 2. Значение сопротивления резистора определяет величина тока управления симистора.
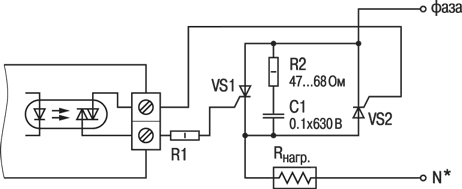
Оптосимистор может также управлять парой встречно-параллельно включенных тиристоров VS1 и VS2 (рис. 3). Для предотвращения пробоя тиристоров из-за высоковольтных скачков напряжения в сети к их выводам рекомендуется подключать фильтрующую RC-цепочку (R2 C1). Оптосимистор имеет встроенное устройство перехода через ноль и поэтому обеспечивает полное открытие подключаемых тиристоров без применения дополнительных устройств.
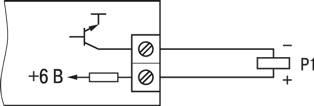
Выход «Т» для управления твердотельным реле
Выход «Т» для управления твердотельным реле выполнен на основе транзисторного ключа n–p–n типа (рис. 4), который имеет два состояния: низкий логический уровень соответствует напряжениям 0...1 В, высокий уровень – напряжениям 4...6 В. Выход «Т» используется для подключения твердотельного реле, рассчитанного на управление постоянным напряжением 4...6 В с током управления не более 100 мА. Внутри выходного элемента устанавливается ограничительный резистор Rогр номиналом 100 Ом.
Выходное устройство аналогового типа
Выходное устройство аналогового типа – это цифроаналоговый преобразователь, который формирует токовую петлю 4…20 мА или напряжение 0…10 В и, как правило, используется для управления электронными регуляторами мощности.
Цепи аналоговых выходных устройств имеют гальваническую изоляцию от схемы прибора.
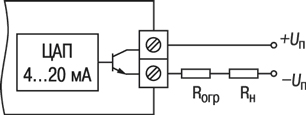
ЦАП 4...20 мА (выход «И»)
Для работы ЦАП 4...20 мА используется внешний источник питания постоянного тока, номинальное значение напряжения Uп которого рассчитывается следующим образом:
Uп.min < Uп < Uп.max;
Uп.min = 10 В + 0,02 A х Rн;
Uп.max = Uп.min + 2,5 В,
где Uп.min и Uп.max — минимально и максимально допустимое напряжения питания, соответственно, В;
Rн — сопротивление нагрузки ЦАП, Ом.
Если по какой-либо причине напряжение источника питания ЦАП, находящегося в распоряжении пользователя, превышает расчетное значение Uп.max, то последовательно с нагрузкой необходимо включить ограничительный резистор (см. рис. 5), сопротивление которого Rогр рассчитывается по формулам:
Rогр.min < Rогр < Rогр.max
|
|  |
| Rогр.ном, Rогр.min и Rогр.max — номинальное, минимально и максимально допустимое значения сопротивления ограничительного резистора, соответственно, Ом; IЦАП.max — максимальный выходной ток ЦАП, мА. | |

ВНИМАНИЕ! Напряжение источника питания ЦАП 4...20 мА не должно превышать 36 В.

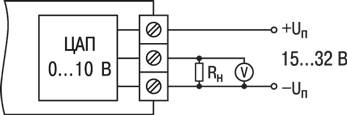
ЦАП 0...10 В (выход «У»)
Для работы ЦАП 0...10 В используется внешний источник питания постоянного тока (см. рис. 7), номинальное значение напряжения которого Uп находится в диапазоне 15...32 В. Сопротивление нагрузки Rн, подключаемой к ЦАП, должно быть не менее 2 кОм.
ВНИМАНИЕ! Напряжение источника питания ЦАП 0...10 В не должно превышать 36 В.
Технические характеристики выходных устройств
| Обозначение | Тип выходного устройства (ВУ) | Электрические характеристики |
| Р | электромагнитное реле | максимальный ток нагрузки – 1 А для ПИД-регулирования, 8 А для сигнализации при напряжении 220 В 50...60 Гц или 30 В пост. тока |
| К | транзисторная оптопара структуры n–p–n типа | максимальный ток нагрузки – 400 мА при напряжении 60 В постоянного тока |
| С | симисторная оптопара | максимальный ток нагрузки – 50 мА при напряжении до 240 В(в импульсном режиме частотой 50 Гц с длительностью импульса не более 5 мс - до 0,5 А) |
| И | цифроаналоговый преобразователь «параметр – ток 4…20 мА» | номинальное сопротивление нагрузки – 0…1000 Ом, напряжение питания 10...30 В пост. тока |
| У | цифроаналоговый преобразователь «параметр – напряжение 0…10 В» | номинальное сопротивление нагрузки – не менее 2 кОм, напряжение питания 15...32 В |
| Т | выход для управления твердотельным реле | выходное напряжение 4...6 В, максимальный выходной ток 50 мА |
Приборы ОВЕН выпускаются в корпусах щитового, настенного или DIN-реечного крепления.
Корпуса выполнены из ударопрочного пластика ABS-пластика и соответствуют ГОСТ 14254-96 «Степени защиты, обеспечиваемые оболочками (код IP), который распространяется на электрооборудование с напряжением не более 72,5 кВ». Код IP отражает степень защиты, обеспечиваемую корпусом прибора, т.е. возможность доступа к его опасным частям, а также попадания внешних твердых предметов и воды в прибор.
Клеммник у приборов щитового крепления находится на задней стенке.
Для доступа к клеммнику прибора настенного крепления необходимо снять верхнюю крышку. В отверстиях подвода внешних связей устанавливаются резиновые уплотнители (втулки).
Для установки прибора на стационарное место работы к нему прилагается комплект крепежных элементов, который может быть двух видов: Н для корпусов настенного крепления и Щ для корпусов щитового крепления.
В комплект в зависимости от корпуса входят:
| Настенный Н | кронштейн ЗУ8.090.20 | 1 шт. |
| винт А.М4-6gх35.48.016 ГОСТ 17473-80 | ||
| Щитовой Щ | фиксаторы | 2 шт. |
Типы корпусов
 |
| Н – корпус настенного крепления, габаритные размеры 130х105х65 мм, степень защиты IP44. |
 |
| Н1 – корпус настенного крепления, габаритные размеры 145х105х65 мм, степень защиты IP20. |
 |
| Щ – корпус щитового крепления, габаритные размеры 96х96х180 мм, степень защиты со стороны передней панели IP20 |
 |
| Щ1 – корпус щитового крепления, габаритные размеры 96х96х70 мм, степень защиты со стороны передней панели IP54 |
 |
| Щ1 – корпус щитового крепления, габаритные размеры 96х96х65 мм, степень защиты со стороны передней панели IP54 (данный тип корпуса Щ1 применяется в обновленной линейке 2ТРМ0...ТРМ12) |
 |
| Щ2 – корпус щитового крепления, габаритные размеры 96х48х100 мм, степень защиты со стороны передней панели IP54 (Щ2N) |
 |
| Щ2 – корпус щитового крепления, габаритные размеры 96х48х100 мм, степень защиты со стороны передней панели IP20 (старый вариант корпуса Щ2, планируется к снятию с производства) |
 |
| Щ3 – корпус щитового крепления, габаритные размеры 74х32х70 мм, степень защиты со стороны передней панели IP54 |
 |
| Щ4 – корпус щитового крепления, габаритные размеры 96х96х145 мм, степень защиты со стороны передней панели IP54 |
 |
| Щ5 – корпус щитового крепления, габаритные размеры 48х48х102 мм, степень защиты со стороны передней панели IP54 2 варианта крепления: – с помощью зажима (верхний рисунок) – с помощью фиксаторов (нижний рисунок) |
| |
| Щ7 – корпус щитового крепления с размерами 144×169×50,5 мм, степенью защиты со стороны лицевой панели IP54 и степенью защиты корпуса – IР00. |
 |
| Д – корпус для крепления на DIN-рейку, габаритные размеры 72х88х54 мм, степень защиты со стороны передней панели IP20 |
 |
| Д2 – корпус для крепления на DIN-рейку, габаритные размеры 36х90х58 мм, степень защиты со стороны передней панели IP20 |
 |
| Д3 – корпус для крепления на DIN-рейку, габаритные размеры 54х90х58 мм, степень защиты со стороны передней панели IP20 |
 |
| Д4 – корпус для крепления на DIN-рейку, габаритные размеры 72х90х58 мм, степень защиты со стороны передней панели IP20 |
 |
| Д9 - корпус для крепления на DIN-рейку 35 мм, габаритные размеры 157x86x58 мм, степень защиты со стороны передней панели IP20. |
 |
| Новый тип корпуса – Щ11. Лицевая панель 96х96 мм (как в Щ1), в глубину щита 49 мм (в Щ1 65 мм). Экономит пространство в щите, более удобен при монтаже. |

Сравнение корпусов щитового монтажа по глубине погружной части

При необходимости измерения относительной влажности воздуха надо льдом следует вводить поправку, учитывающую разницу давлений насыщенного водяного пара над водой и льдом.
Эта поправка рассчитывается следующим образом:
По определению
Ψw = 100 p / psw, Ψi =100 p / psi,
где, Ψw, Ψi - относительная влажность воздуха над водой и льдом, соответственно;
p - парциальное давление водяного пара;
psw и psi - парциальные давления водяного пара, насыщенного относительно поверхности воды и льда, соответственно.
Отсюда легко выводится соотношение для пересчета относительной влажности воздуха, насыщенного относительно воды, в относительную влажность воздуха, насыщенного относительно льда:
Ψi =Ψw (psw / psi)
В таблице приведены значения поправочных коэффициентов (psw /psi) при различных температурах, на которые нужно умножать показания термогигрометра, измеряющего относительную влажность над водой, чтобы получить значение относительной влажности воздуха надо льдом.
В таблице Б.1 приведены значения поправочных коэффициентов (psw /psi) при различных температурах, на которые нужно умножать показания термогигрометра, измеряющего относительную влажность над водой, чтобы получить значение относительной влажности воздуха надо льдом.
| Температура | -0 | -10 | -20 | -30 | -40 |
| 0 | 1 | 1,104 | 1,219 | 1,347 | 1,489 |
| -1 | 1,010 | 1,115 | 1,231 | 1,361 | 1,504 |
| -2 | 1,020 | 1,126 | 1,243 | 1,374 | 1,519 |
| -3 | -1,030 | 1,137 | 1,256 | 1,388 | 1,534 |
| -4 | 1,040 | 1,148 | 1,269 | 1,402 | 1,549 |
| -5 | 1,050 | 1,160 | 1,281 | 1,416 | 1,565 |
| -6 | 1,061 | 1,171 | 1,294 | 1,430 | 1,580 |
| -7 | 1,071 | 1,183 | 1,307 | 1,445 | 1,596 |
| -8 | 1,082 | 1,195 | 1,320 | 1,459 | 1,612 |
| -9 | 1,093 | 1,207 | 1,334 | 1,474 | 1,628 |
Пример. Показания термогигрометра при температуре минус 22 °С - 76 % относительной влажности над водой.
Для перевода в значение относительной влажности воздуха надо льдом необходимо:
- определить из таблицы значение поправочного коэффициента для температуры -22 °С. Искомое значение коэффициента 1,243 находим на пересечении столбца «-20 °С» и «-2 °С».
- Умножаем поправочный коэффициент на показания термогигрометра: 76 % ×1,243 = 94,5 %. Таким образом, относительная влажность воздуха надо льдом составляет 94,5 %.
(***) Данные предоставлены ООО НПК "МИКРОФОР".
FAQ
В этом разделе мы публикуем ответы на наиболее часто задаваемые вопросы, которые приходят к нам по электронной почте (support@owen.ru) и публикуются в нашем информационном обозрении «АиП». Отвечают на вопросы инженеры группы технической поддержки ОВЕН.
Терморегулятор ТРМ138 позволяет вычислять разность показаний первого и второго (d1-d2), третьего и четвертого (d3-d4) датчиков. Требуемая функция (d1-d3) отсутствует. Для возможности выполнения функций (d1-d2) и (d1-d3) следует последовательно подключить первый датчик к первому и третьему входу регулятора.
PSW – это регистры, хранящиеся в оперативной памяти прибора. Если в вашей сети есть Мастер, который работает с панелью, он будет обращаться именно к этим регистрам.
Регистры PFW – это регистры энергонезависимой памяти. Они предназначены для сохранения данных в случае потери питания. Эти регистры недоступны для изменения из сети.
Регистры PSB – побитная адресация, то есть работа с дискретными переменными, а не с целочисленными регистрами. Область памяти PSB не пересекается с памятью PSW.

Можно использовать датчики емкостного типа (ВБ1.30М.65.20.2.1.К) или датчики уровня поплавкового типа (ПДУ1.1). Емкостные датчики не предназначены для погружения в жидкость. Они устанавливаются только снаружи резервуара и контролируют уровень через диэлектрическое окошко. В качестве измерительного прибора можно использовать прибор САУ-МП.06.
Вариант с поплавковыми датчиками интересен простотой реализации и меньшей ценой (относительно предыдущего). Датчик ПДУ имеет на выходе геркон (ток коммутации < 0,5 А), поэтому его можно подключать к сигнальным лампочкам напрямую, либо к САУ-М6.
В компании ОВЕН можно приобрести датчики поплавкового типа горизонтального ПДУ1.1 и вертикального ПДУ2.1, ПДУ3.1 монтажа.
Существует методика с применением так называемой импульсной трубки (трубка Перкинса), с использованием которой устанавливается датчик давления . При стандартных условиях эксплуатации это позволяет контролировать давление среды с температурой выше норматива датчика ПД100И на 50 – 80 °С.
Датчик типа «термосопротивление» не может использоваться одновременно с двумя или более измерительными приборами, поэтому ни последовательная, ни параллельная схема включения не решат поставленной задачи. Оптимальное решение – это замена используемого датчика на датчик с двумя чувствительными элементами в одном корпусе. Компания ОВЕН изготавливает их на заказ.
Поскольку заменить датчик не представляется возможным, остаётся вариант с заменой прибора: ТРМ1-Щ1.У.Р на двухканальный регулятор 2ТРМ1-Щ1.У.РИ. Его первый канал нужно соединить с МВА8. На втором канале сигнал от термосопротивления будет пропорционально преобразовываться в токовый сигнал (4…20 мА) и подаваться на восьмиканальный модуль ввода МВА8 или на двухканальный модуль МВ110-2А.
Вы правы, пускатель в качестве промежуточного устройства ПИД-регулятора – не лучшее решение. Эти приборы работают в режиме широтно-импульсной модуляции (ШИМ). В таком режиме ПИД-регулятор может включаться 40 – 50 раз в минуту. В подобных случаях следует использовать полупроводниковые коммутаторы – симисторы, тиристоры или твердотельные реле. Для управления твердотельным реле подойдет прибор с выходом «Т», он напрямую подключается к управляющим контактам реле и не требует согласующих элементов или дополнительного питания.
Терморегулятор ТРМ10-Щ2.У.Р имеет выход типа «Р» (электромагнитное реле), его также следует использовать для работы с твердотельным реле. Управляющее напряжение подается от встроенного блока питания 24 В.
Твердотельное реле HD4044ZD3, радиатор РТР-061.
Подключите прибор к свободному СОМ-порту ПК через преобразователь интерфейса RS-232/RS-485 ОВЕН АС3-М или к USB-порту при помощи преобразователя USB/RS-485 ОВЕН АС4 (возможно использование преобразователя другого производителя). Установите на ПК последнюю версию программы конфигурирования прибора, которую можно скачать бесплатно. Если будете использовать преобразователь АС4, то необходимо дополнительно установить драйвер, поставляемый в комплекте с АС4. Для коммутации «прибор – преобразователь» потребуется кабель типа витая пара, для коммутации «преобразователь – ПК» необходим стандартный USB-кабель для АС4, который поставляется в комплекте с АС4.
После соединения включите прибор и установите в группе параметров программирования COM следующие значения:
- скорость обмена 115200 кб/сек;
- задержка ответа 20 мс;
- длина адреса 8 бит;
- базовый адрес задается для каждого прибора индивидуально.
Для приборов серии ТРМ2хх необходимо установить базовый адрес кратный двум (0, 2, 4 ... 256). Запустите программу опроса или конфигурирования приборов, в сетевых настройках укажите установленные ранее параметры. Перезагрузите приборы путем отключения и включения напряжения питания. Снова запустите программу конфигурирования для связи прибора с компьютером.
Барьер ИСКРА-ТС.01 имеет три канала, каждый из которых предназначен для подключения термопреобразователя сопротивления по трехпроводной схеме. Схема подключения «датчик/ИСКРА/ТРМ101» показана на рис. 1. При подключении барьера к регулятору ТРМ101 (или другому прибору) необходимо учитывать, что трехпроводная схема, обеспечивает компенсацию сопротивлений подводящих проводов при условии равенства сопротивлений двух из них (в нашем случае это линии В и С). Сопротивление каждой линии включает в себя сопротивление провода от датчика к барьеру, сопротивление канала Искры и сопротивление провода от Искры до прибора. В барьере сопротивления каналов не одинаковые, поэтому необходимо подключить барьер к ТРМ101 так.
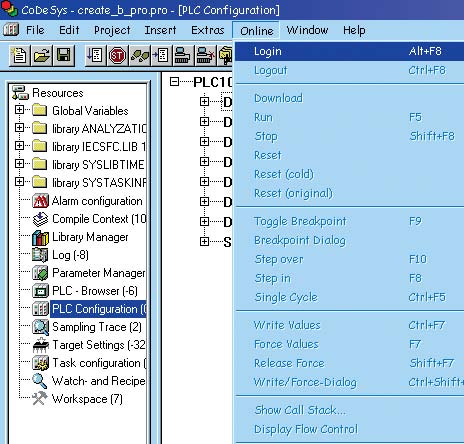
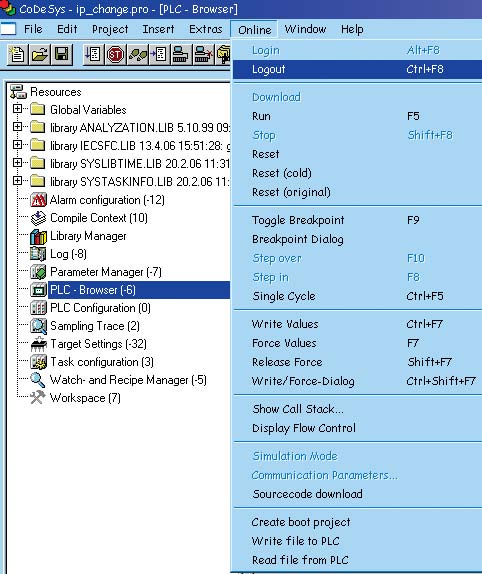
Для того чтобы сохранить в контроллере скомпилированный проект в CoDeSys, необходимо сохранить его в энергонезависимой памяти контроллера. В противном случае после отключения питания она будет храниться в контроллере в течение нескольких минут в зависимости от степени зарядки аккумулятора. Для сохранения проекта в контроллере его сначала нужно сохранить на компьютере. Затем установить связь ПК с контроллером. В меню Online CoDeSys выбрать пункт login (рис. 3). При этом проект загрузится в оперативную память ПЛК. Затем для записи в энергонезависимую память ПЛК следует выбрать в меню Online пункт create boot project (рис. 4) и дождаться окончания загрузки. После этого программа будет сохранена в памяти ПЛК и не пропадет после выключения питания. При последующих включениях ПЛК, контроллер автоматически будет выполнять загруженную программу.
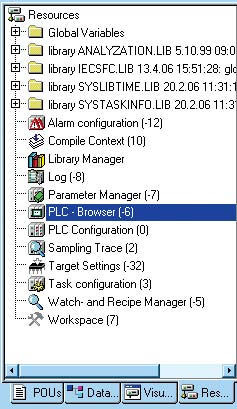
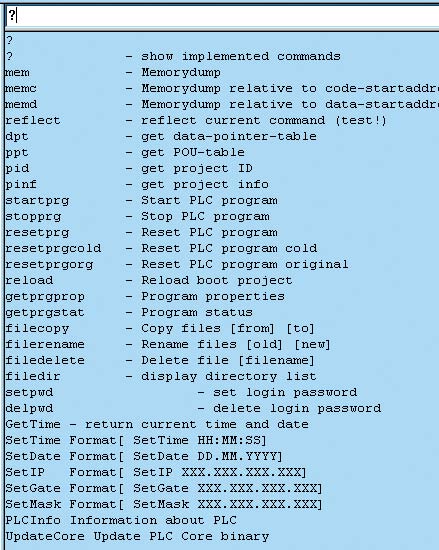
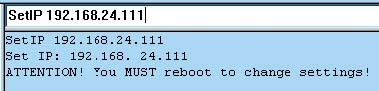
Изменение сетевых настроек ПЛК производится с помощью ресурса PLC Browser. Данный ресурс доступен в CoDeSys, в менеджере объектов на вкладке Resources (рис. 1). Для начала необходимо связаться с ПЛК по интерфейсу RS-232 с помощью меню Online/login (рис. 2). Затем в строке ввода PLC Browser необходимо ввести знак вопроса. После нажатия клавиши Enter на экране появятся все доступные функции браузера (рис. 3). Изменять IP-адрес ПЛК (например, SetIP 192.168.24.111) можно при помощи функции SetIP. После ввода строки, содержащей функцию и новый IP-адрес, нажмите Enter (рис. 4). Аналогичным образом используются функции SetMask для смены маски подсети и SetGate для изменения адреса шлюза. После внесения всех необходимых изменений необходимо отключить ПЛК от ПК, используя меню Online/logout (рис. 5) и перезагрузить ПЛК, нажав кнопку «Сброс» на лицевой панели контроллера. После этого внесенные изменения будут установлены.
Если в ТРМ1 отключено логическое устройство (ЛУ), то это означает, что он настроен на работу только в качестве измерителя. Для того чтобы осуществлять регулирование, необходимо включить логическое устройство, используя параметр «А1-1» – в ТРМ1 (параметры «А1-1» и «А2-1» в 2ТРМ1). Логическое устройство может работать в следующих режимах:
- нагревателя (прямой гистерезис) А1-1=«01»;
- охладителя (обратный гистерезис) А1-1=«02»;
- «П»- образной логики А1-1=«03»;
- «U»- образной логики А1-1=«04»;
При наличии выходного устройства типа «И» (4…20 мА) или «У» (0…10 В):
- пропорционального регулятора нагревателя А1-1=«05»;
- пропорционального регулятора охладителя А1-1=«06»;
- регистратора А1-1=«07».
Если параметр А1-1=«oFF» – логическое устройство выключено.
- Что означает фраза «прибор может работать по различным протоколам, а конфигурируется только по протоколу ОВЕН» в описании МДВВ?
- В каком положении должна стоять перемычка jp1 при записи или чтении параметров?
- Зачем нужна перемычка jp3?
- Как пользоваться атрибутами РЕДАКТИРУЕМЫЙ и НЕРЕДАКТИРУМЫЙ?
1. Фраза «конфигурируется по протоколу ОВЕН» означает, что дополнительные параметры, такие как: тип датчика, сетевые параметры и прочее могут быть заданы только в «Конфигураторе МДВВ» при использовании протокола ОВЕН. Другие протоколы могут быть использованы для передачи измеренных значений или управления выходами.
2. Перемычка jp1 используется для установки заводских параметров связи модуля с компьютера. Если jp1 установлена, то связь с прибором происходит по заводским параметрам. Если МДВВ работает с пользовательскими настройками, то перемычка jp1 должна быть снята.
3. Перемычка jp3 используется для наладки прибора изготовителем. Пользователям работа с этой перемычкой запрещена.
4. РЕДАКТИРУЕМЫЙ параметр вы можете изменить, записав его новое значение в прибор. НЕРЕДАКТИРУЕМЫЙ – можно только считать или посмотреть.
Не во все датчики можно установить таблетку НПТ-2. Головки датчиков бывают 3-х типов. НПТ-2 может применяться только, в так называемой, пластмассовой (увеличенной) головке, которая еще называется «луцкой».
Возможность установки преобразователя в пластмассовой (увеличенной) головке зависит еще и от крепежа проводов. Напоминаем, что в НПТ-2 используется только 2-проводная схема подключения, поэтому датчик в который она встраивается, может быть только 2-проводным. Для того, чтобы убедиться в возможности применения преобразователя, снимите крышку с головки и посмотрите, какой крепеж вмонтирован в датчике. Если в датчике 4-проводная схема подключения, то преобразователь можно будет использовать, убрав пару проводов, идущих от сенсора к контактам 3 и 4, а оставшиеся контакты будут использоваться для выхода (4...20 мА). Если же вы обнаружите обычный клеммник, который применяется для коммутации проводов в приборах, тогда преобразователь не подойдет. Отметим, что датчики с встроенным нормирующим преобразователем не изготавливаются во взрывобезопасном исполнении, т.е. с маркировкой Ех.
Обращаем ваше внимание, если заранее известно, что вам потребуется датчик температуры с выходом 4...20 мА, то заказывайте датчик с уже установленной таблеткой. К примеру, модель датчика ДТС065-100П.А4.160 с встроенной таблеткой НПТ-2 имеет маркировку ДТС065-100П.0,25.160.И.
Если нет возможности использовать встроенный преобразователь, то следует приобрести внешний нормирующий преобразователь, например, преобразователи производства ОВЕН - НПТ-1.00.1.2 – это универсальные преобразователи «температура/ток», работающие практически с любыми типами сенсоров. Они выполнены в корпусе для монтажа на DIN-рейку.



