Программное управление электроприводом поворотного стола



Компания: Камнеобрабатывающая фабрика "Данила-Мастер"
Город: Ярославль
Используемая продукция ОВЕН:
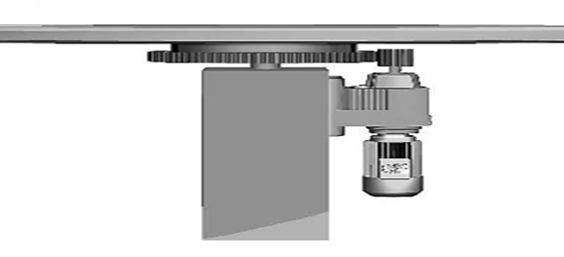
Целью создания проекта является автоматизация процесса поворота стола камнеобрабатывающего станка и его надежная фиксация при остановке. Поворотная плита стола должна поворачиваться на угол 90 градусов относительно своего начального положения и обратно по команде оператора. Автоматизировать процесс поворота можно с помощью внедрения частотно-управляемого электропривода, состоящего из трехфазного источника переменного тока, трехфазного асинхронного электродвигателя с короткозамкнутым ротором и встроенным электромагнитным тормозом, преобразователя частоты, программируемого логического контроллера, стола с поворотной плитой.
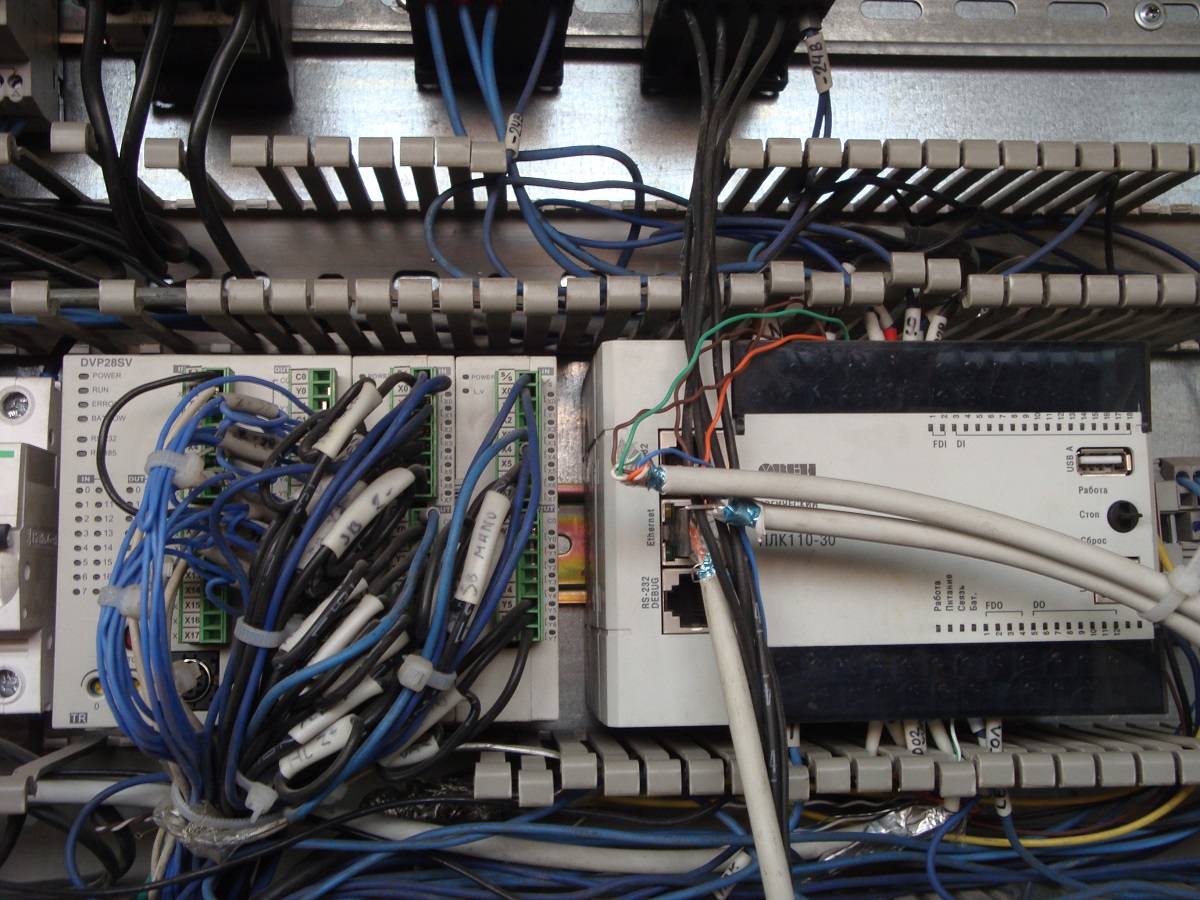
Для реализации был выбран программируемый контроллер ОВЕН ПЛК110 и преобразователь частоты ОВЕН ПЧВ1. ПЛК в комбинации с ПЧВ представляют систему управления приводом, а комбинация системы управления, электродвигателя и редуктора представляют собой электропривод переменного тока. Электрическая энергия передается от источника электроэнергии к системе управления, и от ПЧВ – к электродвигателю. Механическая энергия передается от электродвигателя к редуктору и от последнего – к поворотному столу. ПЛК получает сигналы задания от кнопок управления и сигналы от датчиков управления (энкодера и бесконтактного выключателя), обрабатывает их и посылает сигналы управления ПЧ.
Алгоритм управления электроприводом поворотного стола
Для выполнения пуско-наладочных работ предусмотрен переключатель режима «АВТ./Ручн.». Ручное управление активируется при переведении переключателя в положение «Вкл.», по умолчанию используется автоматическое управление.
В ручном режиме управление поворотным столом происходит кнопками «Вперед-Назад», при этом стол движется по часовой стрелке или в обратном направлении с частотой 5 Гц. Поворотная плита находится в движении только при удержании кнопок управления во включенном состоянии.
Автоматическое управления поворотным столом выполняется по следующему алгоритму. Предположим, что в исходном положении поворотная плита стола находится в крайнем положении, соответствующем углу поворота 0 град. Каждый раз при однократном нажатии кнопки «Вперед» перед началом движения стола выполняется автоматическая корректировка начального положения на частоте 5 Гц. Условием удачной корректировки служит срабатывание индуктивного датчика, расположенного на неподвижном основании стола, при этом, если выполняется логическое соотношение 2 (ЛС2, см. «Алгоритм управления»), то программный счетчик обнуляется, и подается команда на плавный разгон двигателя на частоте вращения 75 Гц (установлена экспериментально) в направлении часовой стрелки. При неудачной корректировке срабатывание датчика не происходит, и после выполнения пустого цикла поиска «нуля» система возвращается в исходное положение.
При вращении двигателя энкодер вырабатывает последовательность прямоугольных импульсов, которая подается на реверсивный программный счетчик. При движении по часовой стрелке сигнал обрабатывается инкрементным входом счетчика, происходит счет вверх. Углу 90 град. соответствует определенное число импульсов, которое зависит от разрешения энкодера и частоты вращения выходного вала редуктора, на котором закреплен редуктор. Перед торможением ПЛК переводит электродвигатель на пониженную частоту 5 Гц – частоту доводки. Началу участка замедления соответствует уставка перехода на пониженную частоту (ЛС3). При достижении 90 град. ПЛК дает команду ПЧВ на торможение двигателя (ЛС4), одновременно отпускается электромагнитный тормоз. Двигатель остановлен, вал надежно зафиксирован.
Таким образом, управление электропривода по датчику положения (энкодеру) позволяет осуществлять очень точное позиционирование объекта управления.
После активации (однократного нажатия) кнопки «Назад» и выполнения логического соотношения 5 (ЛС5) электромагнитный тормоз растормаживается, и двигатель осуществляет плавный разгон до частоты вращения 75 Гц в обратном направлении. При этом сигнал с энкодера обрабатывается декрементным входом счетчика, происходит счет вниз. При достижении уставки участка замедления (ЛС6), как и в предыдущем случае, двигатель переходит на частоту доводки для более точного торможения. При достижении 0 град. ПЧ переводит двигатель в режим торможения (ЛС7), а тормоз отпускается, тем самым фиксируя вал.
В обоих случаях система управления электропривода повторяет один и тот же алгоритм программы (цикл), загруженный в программный файл ПЛК. Такая система управления носит название циклового программного управления (ЦПУ). Единственным различием является наличие автоматической корректировки начального положения механизма при подаче сигнала от кнопки «Вперед».
Автоматическая корректировка начального положения служит для устранения набегающей погрешности люфтов механизма поворота и переводит систему управления электроприводом из разомкнутой в замкнутую. Бесконтактный выключатель является своего рода датчиком обратной связи, необходимый для осуществления функции саморегулирования системы.
Используемая продукция ОВЕН


Продукция других производителей
Мотор-редуктор SEW-EURODRIVE
Энкодер Delta Electronics
Индуктивный сенсор BALLUFF
Кнопки управления Schneider Electric
Дополнительные материалы
Информация о компании
Компания: Камнеобрабатывающая фабрика "Данила-Мастер"
Контактное лицо: Павел
Телефон: 89201237065
E-mail: G.P.V.29@yandex.ru